
Abstract
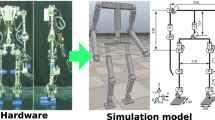
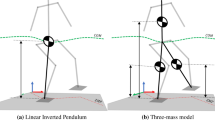
Common methods of gait generation of bipedal locomotion based on experimental results, can successfully synthesize biped joints’ profiles for a simple walking. However, most of these methods lack sufficient physical backgrounds which can cause major problems for bipeds when performing fast locomotion such as running and jumping. In order to develop a more accurate gait generation method, a thorough study of human running and jumping seems to be necessary. Most biomechanics researchers observed that human dynamics, during fast locomotion, can be modeled by a simple spring loaded inverted pendulum system. Considering this observation, a simple approach for bipedal gait generation in fast locomotion is introduced in this paper. This approach applies a nonlinear control method to synchronize the biped link-segmental dynamics with the spring-mass dynamics. This is done such that while the biped center of mass follows the trajectory of the mass-spring model, the whole biped performs the desired running/jumping process. A computer simulation is done on a three-link under-actuated biped model in order to obtain the robot joints’ profiles which ensure repeatable hopping. The initial results are found to be satisfactory, and improvements are currently underway to explore and enhance the capabilities of the proposed method.
Similar content being viewed by others

References
Kajita, S., Kanehiro, F., Kaneko, K., Fujiwara, K., Harada, K., Yokoi, K., Hirukawa, H.: Resolved momentum control: humanoid motion planning based on the linear and anular momentum. IEEE/RSJ Int. Conf. Int. Robots Syst. 2, 1644–1650 (2003)
Kajita, S., Kanehiro, F., Kaneko, K., Fujiwara, K., Harada, K., Yokoi, K., Hirukawa, H.: Biped walking pattern generation by using preview control of zero-monment point. IEEE Int. Conf. on Robotics Auto. 2, 1620–1626 (2003)
Kuffner, J., Kagami, S., Nishiwaki, K., et al.: Dynamically-stable motion planning for humanoid robots. J. Auton. Robots 12, (1), 105–118 (2002)
Sugihara, T., Nakamura, Y., Inoue, H.: Realtime humanoid motion generation through zmp manipulation based on inverted pendulum control. IEEE Int. Conf. on Robotics and Automation, 2, 1404–1409 (2002)
Chevallereau, C., Aoustin, Y.: Optimal reference trajectories for walking and running of a biped robot. Robotica 19, 557–569 (2001)
Huang, Q., Yokoi, K., Kajita, S., Kaneko, K., Arai, H., Koyachi, N., Tanie, K.: Planning walking patterns for a biped robot. IEEE Trans. Robot. Autom. 17, 280–289 (2001)
Suzuki, T., Tsuji, T., Ohnishi, K.: Trajectory planning of biped robot for running motion. 32nd IEEE Conf. on Industrial Electronics Society, pp 1815–1820 (2005)
Seyfarth, A., Friedrichs, A., Wank, V., Blickhan R.: Dynamics of the long jump. J. Biomechanics, 32, 1259–1267 (1999)
Farley, C.T., Glasheen, J., McMahon, T.A.: Running springs: speed and animal size. J. Exp. Biol. 185, 71–86 (1993)
Seyfarth, A., Geyer, H., Gunther, M., Blickhan, R.: A movement criterion for running. J Biomech, 35, 649–655, (2002)
Geyer, H., Sayfarth, A., Blickhan, R.: Spring-mass running: simple approximate solution and application to gait stability. J. Theor. Biol., 232, 315–328 (2004)
Koditschek, D.E., Robert, J., Buehler, M.: Mechanical aspects of legged locomotion control. J. Arthropod Struct. Dev., 33, 251–272 (2004)
McMahon, T.A., Cheng, G.C.: The mechanics of running: how does stiffness couple with speed? J. Biomech. 23, (suppl. 1), 65–78 (1990)
Blickhan, R.: The spring-mass model for running and hopping. J. Biomech. 22, 1217–1227 (1989)
Schwind, W.J.: Spring loaded inverted pendulum running: a plant model. Dissertation, University of Michigan-Ann Arbor (1998)
Tamaddoni, S.H., Alasty, A., Meghdari, A., Sohrabpour, S., Salarieh, H.: Spring-mass jumping of underactuated biped robots. CD Proc. of the 6th ASME Intl. Conf. on Multibody Systems, Nonlinear Dynamics, and Control, IDETC (2007)
Poulakakis, I., Grizzle J.W.: Formal embedding of the spring loaded inverted pendulum in an asymmetric hopper. European Control Conference (2007)
Westervelt, E.R., Buche, G., Grizzle, J.W.: Experimental validation of a framework for the design of controllers that induce stable walking in planar bipeds. Int. J. Robotics Res. 23, 559–582 (2004)
Tamaddoni, S.H., Jafari, F., Meghdari, A., Sohrabpour, S.: Dynamic simulation and modeling of Sharif humanoid robot: a case study. Proc. of the 15th ISME Annual Conf. on Mechanical Engineering (2007)
Meghdari, A., Aryanpour, M.: Dynamic modeling and analysis of the human jumping process. J. Int. Robotics Syst. 37, 97–115 (2003)
Xiuping, M.: Dynamics and motion regulation of five-link biped robot walking in the sagittal plane. Dissertation, University of Manitoba (2004)
Schwind, W.J., Koditschek, D.E.: Approximating the stance map of a 2 DOF monoped runner. J. Nonlinear Sci. 10, 533–568 (2000)
Kajita S., Nagasaki T., Kaneko K., Hirukawa H.: ZMP-based biped running control. IEEE Robot. Autom. Mag., 14, 63–72 (2007)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Meghdari, A., Sohrabpour, S., Naderi, D. et al. A Novel Method of Gait Synthesis for Bipedal Fast Locomotion. J Intell Robot Syst 53, 101–118 (2008). https://doi.org/10.1007/s10846-008-9233-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-008-9233-6